Internal implementation class for driver use only, stores all the kuka state data in a simple object. More...
#include <Kuka.hpp>
 Collaboration diagram for grl::robot::arm::KukaState:
Collaboration diagram for grl::robot::arm::KukaState: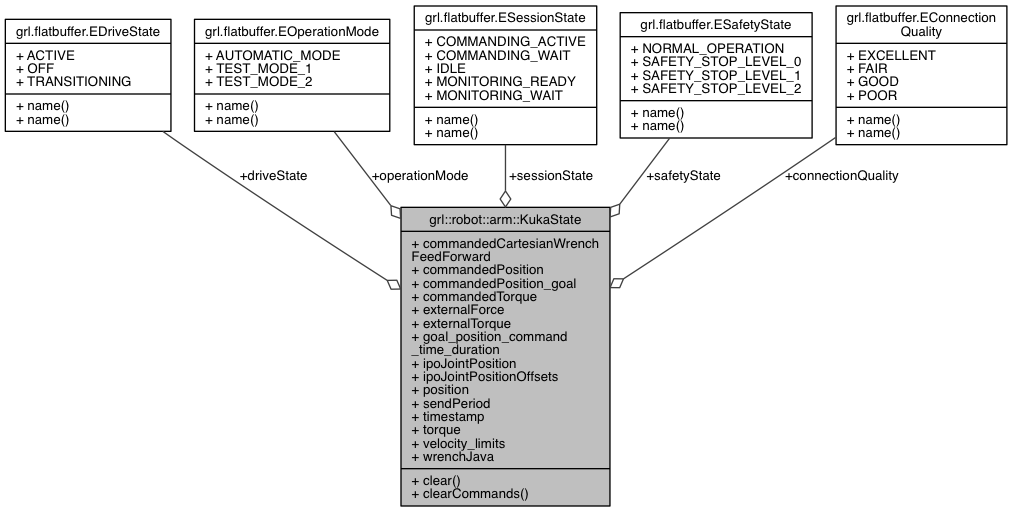
Public Types | |
| typedef boost::container::static_vector< double, 7 > | cartesian_state |
| typedef boost::container::static_vector< double, KUKA::LBRState::NUM_DOF > | joint_state |
| typedef std::chrono::time_point< std::chrono::high_resolution_clock > | time_point_type |
Public Member Functions | |
| void | clear () |
| void | clearCommands () |
Public Attributes | |
| cartesian_state | commandedCartesianWrenchFeedForward |
| joint_state | commandedPosition |
| joint_state | commandedPosition_goal |
| we need to mind arm constraints, so we set a goal then work towards it More... | |
| joint_state | commandedTorque |
| flatbuffer::EConnectionQuality | connectionQuality |
| flatbuffer::EDriveState | driveState |
| cartesian_state | externalForce |
| joint_state | externalTorque |
| double | goal_position_command_time_duration |
| joint_state | ipoJointPosition |
| joint_state | ipoJointPositionOffsets |
| flatbuffer::EOperationMode | operationMode |
| joint_state | position |
| flatbuffer::ESafetyState | safetyState |
| std::chrono::milliseconds | sendPeriod |
| flatbuffer::ESessionState | sessionState |
| time_point_type | timestamp |
| joint_state | torque |
| joint_state | velocity_limits |
| cartesian_state | wrenchJava |
Detailed Description
Internal implementation class for driver use only, stores all the kuka state data in a simple object.
- Todo:
- replace with something generic
- Deprecated:
- this is an old implemenation that will be removed in the future, do not depend on this struct directly.
- Todo:
- commandedPosition and commandedPosition_goal are used a bit ambiguously, figure out the difference and clean it up.
Member Typedef Documentation
§ cartesian_state
| typedef boost::container::static_vector<double, 7> grl::robot::arm::KukaState::cartesian_state |
§ joint_state
| typedef boost::container::static_vector<double, KUKA::LBRState::NUM_DOF> grl::robot::arm::KukaState::joint_state |
§ time_point_type
| typedef std::chrono::time_point<std::chrono::high_resolution_clock> grl::robot::arm::KukaState::time_point_type |
Member Function Documentation
§ clear()
§ clearCommands()
Member Data Documentation
§ commandedCartesianWrenchFeedForward
| cartesian_state grl::robot::arm::KukaState::commandedCartesianWrenchFeedForward |
§ commandedPosition
| joint_state grl::robot::arm::KukaState::commandedPosition |
§ commandedPosition_goal
| joint_state grl::robot::arm::KukaState::commandedPosition_goal |
§ commandedTorque
| joint_state grl::robot::arm::KukaState::commandedTorque |
§ connectionQuality
| flatbuffer::EConnectionQuality grl::robot::arm::KukaState::connectionQuality |
§ driveState
| flatbuffer::EDriveState grl::robot::arm::KukaState::driveState |
§ externalForce
| cartesian_state grl::robot::arm::KukaState::externalForce |
§ externalTorque
| joint_state grl::robot::arm::KukaState::externalTorque |
§ goal_position_command_time_duration
| double grl::robot::arm::KukaState::goal_position_command_time_duration |
time duration over which commandedPosition_goal is expected to be reached. this will be used when computing the trajectory with which the low level algorithm will approach the goal position. This should be strictly greater than or equal to timestamp.
- Note
- : this is part of the driver wrapper and is not present in the underlying kuka APIs.
§ ipoJointPosition
| joint_state grl::robot::arm::KukaState::ipoJointPosition |
§ ipoJointPositionOffsets
| joint_state grl::robot::arm::KukaState::ipoJointPositionOffsets |
§ operationMode
| flatbuffer::EOperationMode grl::robot::arm::KukaState::operationMode |
§ position
| joint_state grl::robot::arm::KukaState::position |
§ safetyState
| flatbuffer::ESafetyState grl::robot::arm::KukaState::safetyState |
§ sendPeriod
| std::chrono::milliseconds grl::robot::arm::KukaState::sendPeriod |
§ sessionState
| flatbuffer::ESessionState grl::robot::arm::KukaState::sessionState |
§ timestamp
| time_point_type grl::robot::arm::KukaState::timestamp |
§ torque
| joint_state grl::robot::arm::KukaState::torque |
§ velocity_limits
| joint_state grl::robot::arm::KukaState::velocity_limits |
velocity_limits we need to mind arm constraints, so we set a goal then work towards it. While velocity limits are not provided explicitly by KUKA in their low level C++ API, if you send a command that violates the velocity limits the arm stops immediately with an error.
§ wrenchJava
| cartesian_state grl::robot::arm::KukaState::wrenchJava |
The documentation for this struct was generated from the following file: