#include <boost/lexical_cast.hpp>#include <boost/algorithm/string/predicate.hpp>#include <boost/container/static_vector.hpp>#include <boost/range/algorithm/copy.hpp>#include <boost/range/algorithm/transform.hpp>#include <boost/exception/all.hpp>#include "grl/flatbuffer/KUKAiiwa_generated.h"#include "grl/tags.hpp"#include "grl/exception.hpp" Include dependency graph for Kuka.hpp:
Include dependency graph for Kuka.hpp: This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: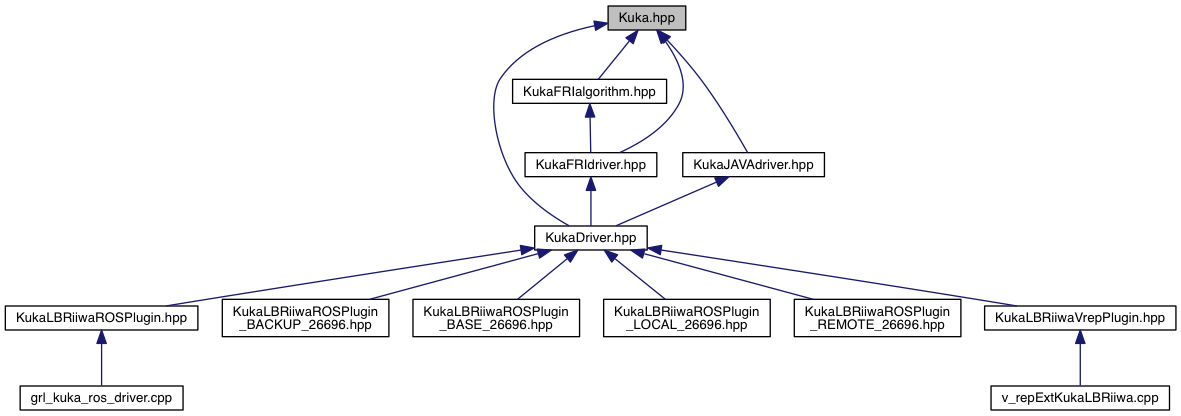
Go to the source code of this file.
Classes | |
| struct | grl::robot::arm::KukaState |
| Internal implementation class for driver use only, stores all the kuka state data in a simple object. More... | |
| class | grl::robot::arm::KukaUDP |
| Internal class, defines some default status variables. More... | |
Namespaces | |
| grl | |
| grl::robot | |
| grl::robot::arm | |
| KUKA | |
| KUKA::LBRCommand | |
| KUKA::LBRState | |
Functions | |
| template<typename OutputIterator > | |
| OutputIterator | grl::robot::arm::copy (std::string model, OutputIterator it, grl::revolute_joint_velocity_open_chain_state_constraint_tag) |
| copy vector of joint velocity limits in radians/s More... | |
Variables | |
| constexpr auto | grl::robot::arm::KUKA_LBR_IIWA_14_R820 = "KUKA_LBR_IIWA_14_R820" |
| constexpr auto | grl::robot::arm::KUKA_LBR_IIWA_7_R800 = "KUKA_LBR_IIWA_7_R800" |
| const int | KUKA::LBRCommand::LBRCOMMANDMESSAGEID = 0x34001 |
| const int | KUKA::LBRState::LBRMONITORMESSAGEID = 0x245142 |
| const int | KUKA::LBRState::NUM_DOF = 7 |