#include <VrepVFController.hpp>
 Inheritance diagram for grl::VrepInverseKinematicsController:
Inheritance diagram for grl::VrepInverseKinematicsController: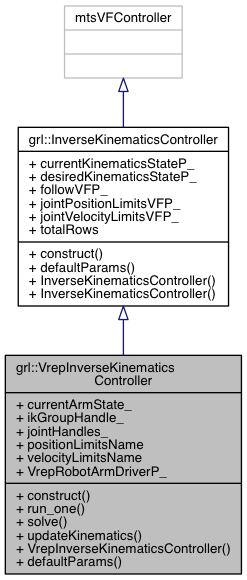 Collaboration diagram for grl::VrepInverseKinematicsController:
Collaboration diagram for grl::VrepInverseKinematicsController: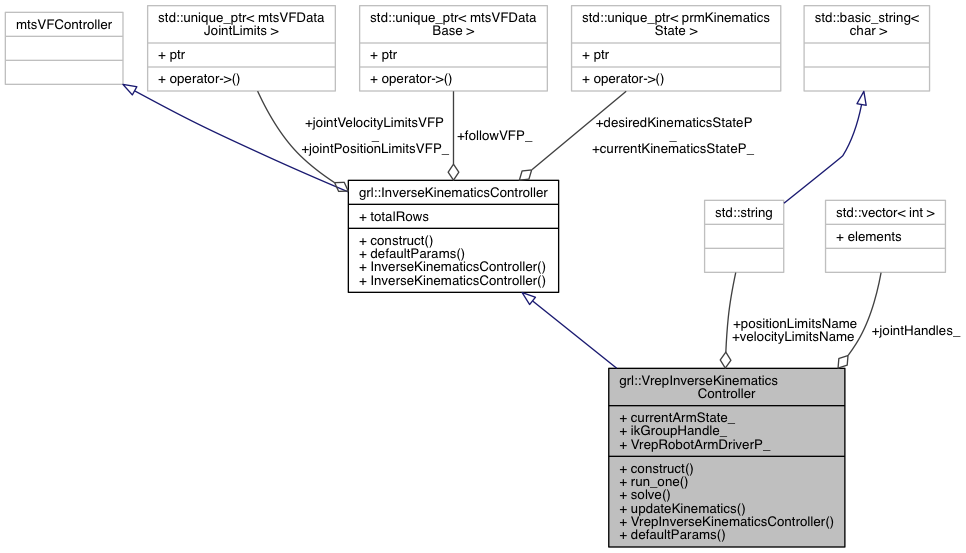
Public Types | |
| typedef std::tuple< std::string,std::string > | Params |
| typedef grl::InverseKinematicsController | parent_type |
| enum | VrepVFControllerParamsIndex { DesiredKinematicsObjectName, IKGroupName } |
| Public Types inherited from grl::InverseKinematicsController | |
| enum | GrlVFControllerParamsIndex { currentKinematicsName, desiredKinematicsName, followVFName, followVFNumRows, jointVelocityLimitsVFName, JointVelocityLimitsVFNumRows, JointPositionVFName, JointPositionNumRows } |
| typedef std::tuple< std::string,std::string,std::string,std::size_t,std::string,std::size_t,std::string,std::size_t > | Params |
| typedef mtsVFController | parent_type |
Public Member Functions | |
| void | construct (Params params=defaultParams()) |
| void | run_one () |
| void | solve () |
| void | updateKinematics () |
| check out sawConstraintController More... | |
| VrepInverseKinematicsController (size_t num_joints=7, mtsVFBase::CONTROLLERMODE cm=mtsVFBase::CONTROLLERMODE::JPOS) | |
| Public Member Functions inherited from grl::InverseKinematicsController | |
| void | construct () |
| Params | defaultParams () |
| InverseKinematicsController (size_t num_joints, mtsVFBase::CONTROLLERMODE cm) | |
| InverseKinematicsController () | |
Static Public Member Functions | |
| static Params | defaultParams () |
Public Attributes | |
| vrep::VrepRobotArmDriver::State | currentArmState_ |
| int | ikGroupHandle_ |
| std::vector< int > | jointHandles_ |
| std::string | positionLimitsName |
| std::string | velocityLimitsName |
| std::shared_ptr< vrep::VrepRobotArmDriver > | VrepRobotArmDriverP_ |
| Public Attributes inherited from grl::InverseKinematicsController | |
| std::unique_ptr< prmKinematicsState > | currentKinematicsStateP_ |
| This will hold the Jacobian. More... | |
| std::unique_ptr< prmKinematicsState > | desiredKinematicsStateP_ |
| This will hold the xyz position and the rotation of where I want to go. More... | |
| std::unique_ptr< mtsVFDataBase > | followVFP_ |
| std::unique_ptr< mtsVFDataJointLimits > | jointPositionLimitsVFP_ |
| joints cannot go to certain position More... | |
| std::unique_ptr< mtsVFDataJointLimits > | jointVelocityLimitsVFP_ |
| need velocity limits for the joints More... | |
Additional Inherited Members | |
| Static Public Attributes inherited from grl::InverseKinematicsController | |
| static const std::size_t | totalRows = 7 |
Detailed Description
- Todo:
- verify Robotiiwa is the correct base, and RobotMillTipTarget is the right target, because if the transform doesn't match the one in the jacobian the algorithm will break
Definition at line 31 of file VrepVFController.hpp.
Member Typedef Documentation
§ Params
| typedef std::tuple< std::string ,std::string > grl::VrepInverseKinematicsController::Params |
Definition at line 47 of file VrepVFController.hpp.
§ parent_type
Definition at line 34 of file VrepVFController.hpp.
Member Enumeration Documentation
§ VrepVFControllerParamsIndex
| Enumerator | |
|---|---|
| DesiredKinematicsObjectName | |
| IKGroupName | |
Definition at line 39 of file VrepVFController.hpp.
Constructor & Destructor Documentation
§ VrepInverseKinematicsController()
|
inline |
- Todo:
- need to call parent constructor:
Constructor
Definition at line 57 of file VrepVFController.hpp.
Member Function Documentation
§ construct()
|
inline |
- Todo:
- set desiredKinematicsStateP name, INITIALIZE ALL MEMBER OBJECTS, & SET NAMES
- Todo:
- verify object lifetimes
- Todo:
- read objective rows from vrep
- Todo:
- objectiveRows seems to currently be a 3 vector, may eventually want a rotation and translation, perhaps with quaternion rotation
- Todo:
- set vrep explicit handling of IK here, plus unset in destructor of this object
Definition at line 62 of file VrepVFController.hpp.
§ defaultParams()
|
inlinestatic |
Definition at line 49 of file VrepVFController.hpp.
§ run_one()
|
inline |
may not need this it is in the base class blocking call, call in separate thread, just allocates memory
Definition at line 292 of file VrepVFController.hpp.
§ solve()
|
inline |
may not need this it is in the base class this will have output blocking call, call in separate thread, just allocates memory this runs the actual optimization algorithm
Definition at line 302 of file VrepVFController.hpp.
§ updateKinematics()
|
inline |
check out sawConstraintController
The row/column major order is swapped between cisst and VREP!
- Todo:
- does this leak memory when called every time around?
- Todo:
- set rotation component of current position
- Todo:
- set rotation component of desired position
- Todo:
- move code below here back under run_one updateKinematics() call
- Todo:
- need to provide tick time in double seconds and get from vrep API call
- Todo:
- check the return code, if it doesn't have a result, use the VREP version as a fallback and report an error.
- Todo:
- : rethink where/when/how to send command for the joint angles. Return to LUA? Set Directly? Distribute via vrep send message command?
Definition at line 140 of file VrepVFController.hpp.
Member Data Documentation
§ currentArmState_
| vrep::VrepRobotArmDriver::State grl::VrepInverseKinematicsController::currentArmState_ |
Definition at line 309 of file VrepVFController.hpp.
§ ikGroupHandle_
| int grl::VrepInverseKinematicsController::ikGroupHandle_ |
Definition at line 307 of file VrepVFController.hpp.
§ jointHandles_
| std::vector<int> grl::VrepInverseKinematicsController::jointHandles_ |
- Todo:
- move this item back into VrepRobotArmDriver
Definition at line 306 of file VrepVFController.hpp.
§ positionLimitsName
| std::string grl::VrepInverseKinematicsController::positionLimitsName |
Definition at line 310 of file VrepVFController.hpp.
§ velocityLimitsName
| std::string grl::VrepInverseKinematicsController::velocityLimitsName |
Definition at line 311 of file VrepVFController.hpp.
§ VrepRobotArmDriverP_
| std::shared_ptr<vrep::VrepRobotArmDriver> grl::VrepInverseKinematicsController::VrepRobotArmDriverP_ |
Definition at line 308 of file VrepVFController.hpp.
The documentation for this class was generated from the following file: