#include <GrlVFController.hpp>
 Inheritance diagram for grl::InverseKinematicsController:
Inheritance diagram for grl::InverseKinematicsController: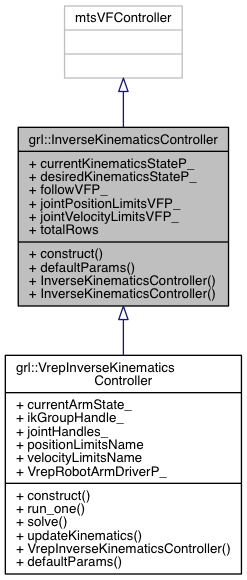 Collaboration diagram for grl::InverseKinematicsController:
Collaboration diagram for grl::InverseKinematicsController: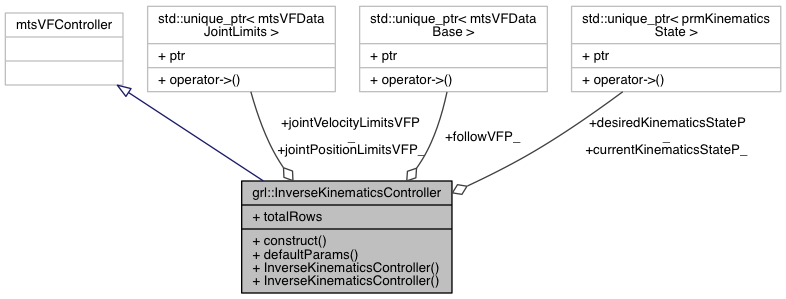
Public Types | |
| enum | GrlVFControllerParamsIndex { currentKinematicsName, desiredKinematicsName, followVFName, followVFNumRows, jointVelocityLimitsVFName, JointVelocityLimitsVFNumRows, JointPositionVFName, JointPositionNumRows } |
| typedef std::tuple< std::string,std::string,std::string,std::size_t,std::string,std::size_t,std::string,std::size_t > | Params |
| typedef mtsVFController | parent_type |
Public Member Functions | |
| void | construct () |
| Params | defaultParams () |
| InverseKinematicsController (size_t num_joints, mtsVFBase::CONTROLLERMODE cm) | |
| InverseKinematicsController () | |
Public Attributes | |
| std::unique_ptr< prmKinematicsState > | currentKinematicsStateP_ |
| This will hold the Jacobian. More... | |
| std::unique_ptr< prmKinematicsState > | desiredKinematicsStateP_ |
| This will hold the xyz position and the rotation of where I want to go. More... | |
| std::unique_ptr< mtsVFDataBase > | followVFP_ |
| std::unique_ptr< mtsVFDataJointLimits > | jointPositionLimitsVFP_ |
| joints cannot go to certain position More... | |
| std::unique_ptr< mtsVFDataJointLimits > | jointVelocityLimitsVFP_ |
| need velocity limits for the joints More... | |
Static Public Attributes | |
| static const std::size_t | totalRows = 7 |
Detailed Description
create the data object and put the data inside
- Todo:
move to own header with no vrep dependencies
figure out how the interface for following the motion will work VFControlller stands for "virtual fixtures" controller
Definition at line 17 of file GrlVFController.hpp.
Member Typedef Documentation
§ Params
| typedef std::tuple< std::string ,std::string ,std::string ,std::size_t ,std::string ,std::size_t ,std::string ,std::size_t > grl::InverseKinematicsController::Params |
Definition at line 41 of file GrlVFController.hpp.
§ parent_type
| typedef mtsVFController grl::InverseKinematicsController::parent_type |
Definition at line 19 of file GrlVFController.hpp.
Member Enumeration Documentation
§ GrlVFControllerParamsIndex
| Enumerator | |
|---|---|
| currentKinematicsName | |
| desiredKinematicsName | |
| followVFName | |
| followVFNumRows | |
| jointVelocityLimitsVFName | |
| JointVelocityLimitsVFNumRows | |
| JointPositionVFName | |
| JointPositionNumRows | |
Definition at line 21 of file GrlVFController.hpp.
Constructor & Destructor Documentation
§ InverseKinematicsController() [1/2]
|
inline |
- Todo:
- this is just done quickly, make it and the constructor be done right
Definition at line 48 of file GrlVFController.hpp.
§ InverseKinematicsController() [2/2]
|
inline |
Definition at line 64 of file GrlVFController.hpp.
Member Function Documentation
§ construct()
|
inline |
Definition at line 69 of file GrlVFController.hpp.
§ defaultParams()
|
inline |
Definition at line 59 of file GrlVFController.hpp.
Member Data Documentation
§ currentKinematicsStateP_
| std::unique_ptr<prmKinematicsState> grl::InverseKinematicsController::currentKinematicsStateP_ |
This will hold the Jacobian.
Definition at line 73 of file GrlVFController.hpp.
§ desiredKinematicsStateP_
| std::unique_ptr<prmKinematicsState> grl::InverseKinematicsController::desiredKinematicsStateP_ |
This will hold the xyz position and the rotation of where I want to go.
Definition at line 76 of file GrlVFController.hpp.
§ followVFP_
| std::unique_ptr<mtsVFDataBase> grl::InverseKinematicsController::followVFP_ |
- Todo:
- will want to use an addVFFollow member function once it is added in
Definition at line 80 of file GrlVFController.hpp.
§ jointPositionLimitsVFP_
| std::unique_ptr<mtsVFDataJointLimits> grl::InverseKinematicsController::jointPositionLimitsVFP_ |
joints cannot go to certain position
Definition at line 85 of file GrlVFController.hpp.
§ jointVelocityLimitsVFP_
| std::unique_ptr<mtsVFDataJointLimits> grl::InverseKinematicsController::jointVelocityLimitsVFP_ |
need velocity limits for the joints
Definition at line 83 of file GrlVFController.hpp.
§ totalRows
|
static |
- Todo:
- maybe parameterize this somehow
Definition at line 45 of file GrlVFController.hpp.
The documentation for this struct was generated from the following file: