defines tag dispatching types used throughout grl More...
#include <boost/geometry/core/tags.hpp>#include <boost/units/physical_dimensions/torque.hpp>#include <boost/units/physical_dimensions/plane_angle.hpp>#include <boost/units/physical_dimensions/force.hpp>#include <boost/units/physical_dimensions/angular_velocity.hpp>#include <boost/units/physical_dimensions/time.hpp> Include dependency graph for tags.hpp:
Include dependency graph for tags.hpp: This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: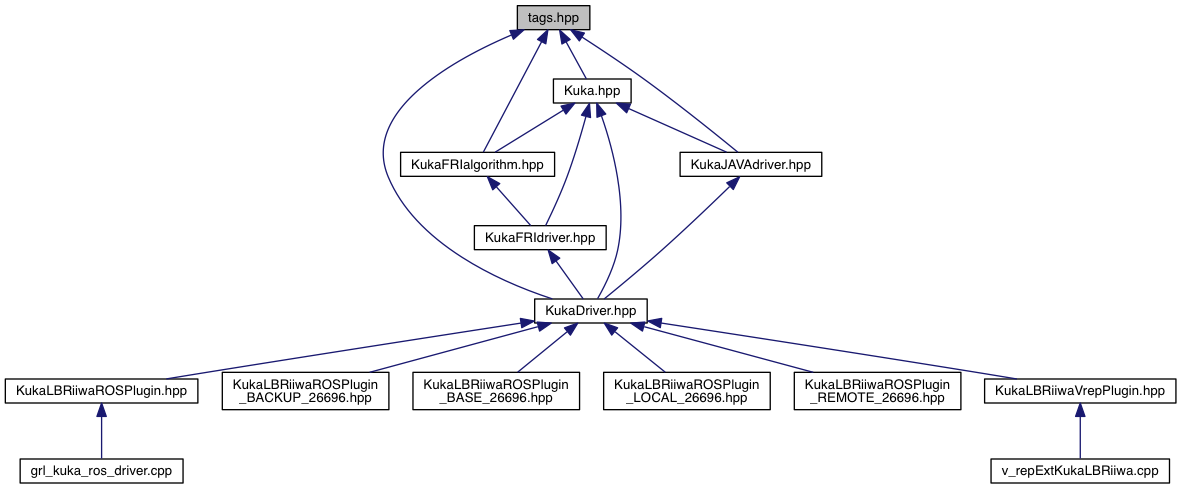
Go to the source code of this file.
Classes | |
| struct | grl::cartesian_external_force_tag |
| external forces, i.e. forces applied to an arm excluding those caused by the mass of the arm itself and gravity More... | |
| struct | grl::cartesian_wrench_command_tag |
| struct | grl::command_tag |
| data for changing a system's physical state, such as joint angles to be sent to a robot arm. More... | |
| struct | grl::constraint_tag |
| Represents a system contraint, such as a max velocity limit. More... | |
| struct | grl::device_command_tag |
| struct | grl::device_state_tag |
| struct | grl::device_tag |
| identifies a type of device More... | |
| struct | grl::external_state_tag |
| struct | grl::interpolated_state_tag |
| struct | grl::joint_tag |
| struct | grl::open_chain_tag |
| struct | grl::prismatic_joint_tag |
| struct | grl::revolute_joint_angle_interpolated_open_chain_state_tag |
| interpolated joint angle More... | |
| struct | grl::revolute_joint_angle_open_chain_command_tag |
| commanded joint angle More... | |
| struct | grl::revolute_joint_angle_open_chain_state_tag |
| joint angle More... | |
| struct | grl::revolute_joint_tag |
| struct | grl::revolute_joint_torque_external_open_chain_state_tag |
| external joint torque, i.e. torques applied to an arm excluding those caused by the mass of the arm itself and gravity More... | |
| struct | grl::revolute_joint_torque_open_chain_command_tag |
| struct | grl::revolute_joint_torque_open_chain_state_tag |
| joint torque More... | |
| struct | grl::revolute_joint_velocity_open_chain_state_constraint_tag |
| joint velocity constraint (ex: max velocity) More... | |
| struct | grl::revolute_joint_velocity_open_chain_state_tag |
| joint velocity More... | |
| struct | grl::state_tag |
| identifies data representing the state of a sytem More... | |
| struct | grl::time_duration_command_tag |
| the time duration over which a command should be completed More... | |
| struct | grl::time_duration_tag |
| used for periodic events More... | |
| struct | grl::time_point_command_tag |
| commanded time stamp, the time at which a command should be completed More... | |
| struct | grl::time_point_tag |
| single point in time relative to some start point More... | |
| struct | grl::time_step_tag |
| time step between measurements More... | |
| struct | grl::wrench_tag |
Namespaces | |
| grl | |
Detailed Description
defines tag dispatching types used throughout grl
http://www.boost.org/community/generic_programming.html#tag_dispatching http://barendgehrels.blogspot.com/2010/10/tag-dispatching-by-type-tag-dispatching.html
Definition in file tags.hpp.