#include <InverseKinematicsVrepPlugin.hpp>
 Collaboration diagram for grl::vrep::InverseKinematicsVrepPlugin:
Collaboration diagram for grl::vrep::InverseKinematicsVrepPlugin: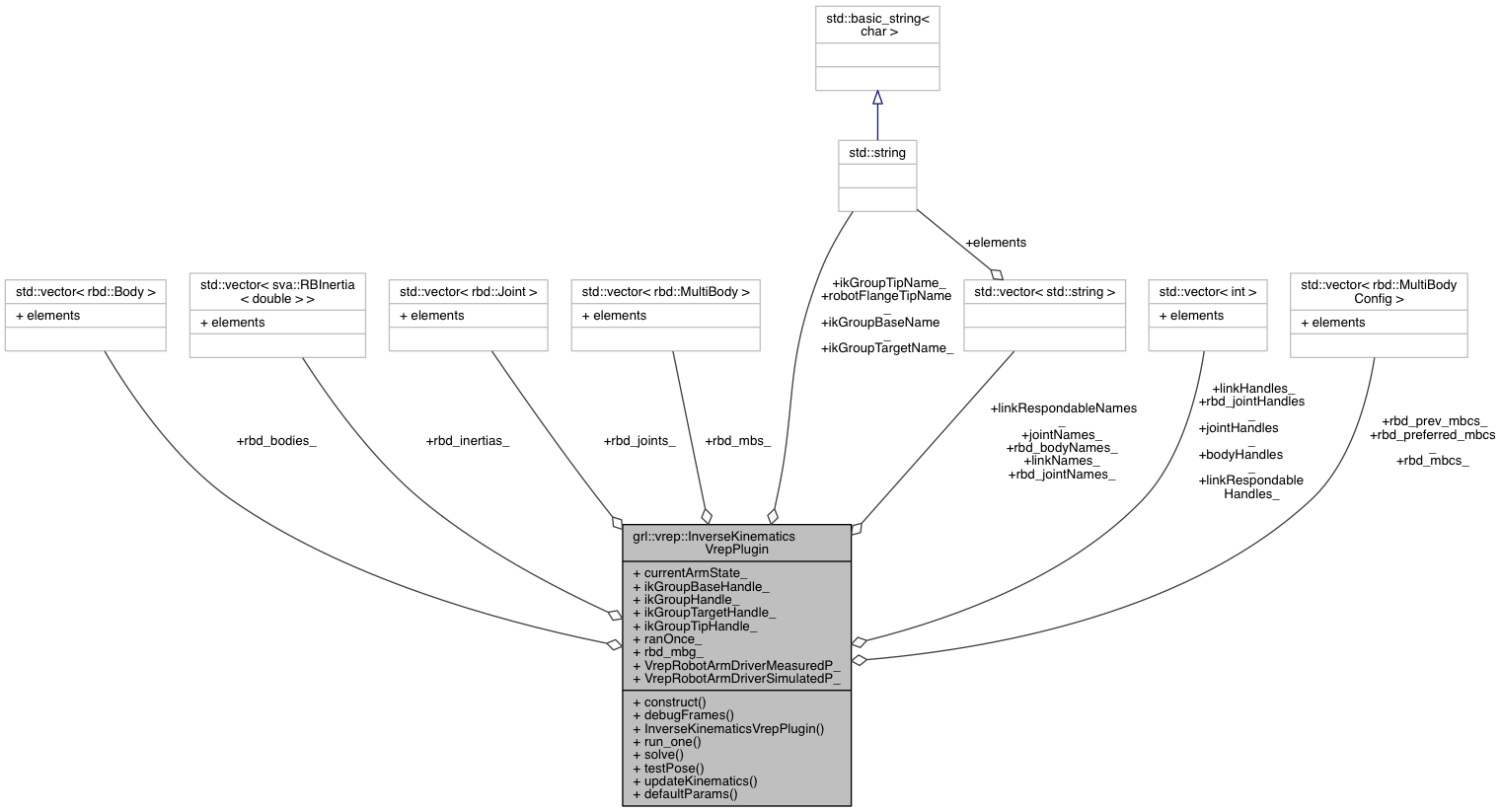
Public Types | |
| enum | AlgToUseE { AlgToUseE::ik, AlgToUseE::multiIterQP, AlgToUseE::singleIterQP } |
| Configures updateKinematics the algorithm the kinematics should use for solving. More... | |
| enum | GoalPosE { GoalPosE::realGoalPosition, GoalPosE::debugGoalPosition } |
| Configures updateKinematics with the goal the kinematics should aim for. More... | |
| typedef std::tuple< std::string,std::string > | Params |
| enum | PostureTaskStrategyE { PostureTaskStrategyE::constant, PostureTaskStrategyE::updateToCurrent } |
| enum | VrepVFControllerParamsIndex { DesiredKinematicsObjectName, IKGroupName } |
Public Member Functions | |
| void | construct (Params params=defaultParams()) |
| void | debugFrames (bool print=false) |
| InverseKinematicsVrepPlugin () | |
| void | run_one () |
| void | solve () |
| void | testPose () |
| void | updateKinematics (const bool runOnce=false, const GoalPosE solveForPosition=GoalPosE::realGoalPosition, const AlgToUseE alg=AlgToUseE::multiIterQP, const PostureTaskStrategyE postureStrategy=PostureTaskStrategyE::constant) |
Static Public Member Functions | |
| static Params | defaultParams () |
Public Attributes | |
| std::vector< int > | bodyHandles_ |
| vrep::VrepRobotArmDriver::State | currentArmState_ |
| int | ikGroupBaseHandle_ |
| std::string | ikGroupBaseName_ |
| int | ikGroupHandle_ |
| int | ikGroupTargetHandle_ |
| std::string | ikGroupTargetName_ |
| int | ikGroupTipHandle_ |
| std::string | ikGroupTipName_ |
| std::vector< int > | jointHandles_ |
| std::vector< std::string > | jointNames_ |
| std::vector< int > | linkHandles_ |
| std::vector< std::string > | linkNames_ |
| std::vector< int > | linkRespondableHandles_ |
| std::vector< std::string > | linkRespondableNames_ |
| bool | ranOnce_ = false |
| std::vector< rbd::Body > | rbd_bodies_ |
| std::vector< std::string > | rbd_bodyNames_ |
| std::vector< sva::RBInertia< double > > | rbd_inertias_ |
| std::vector< int > | rbd_jointHandles_ |
| std::vector< std::string > | rbd_jointNames_ |
| std::vector< rbd::Joint > | rbd_joints_ |
| std::vector< rbd::MultiBodyConfig > | rbd_mbcs_ |
| rbd::MultiBodyGraph | rbd_mbg_ |
| std::vector< rbd::MultiBody > | rbd_mbs_ |
| std::vector< rbd::MultiBodyConfig > | rbd_preferred_mbcs_ |
| preferred posture to resolve ambiguities More... | |
| std::vector< rbd::MultiBodyConfig > | rbd_prev_mbcs_ |
| rbd_prev_mbcs_ is for debugging More... | |
| std::string | robotFlangeTipName_ |
| std::shared_ptr< vrep::VrepRobotArmDriver > | VrepRobotArmDriverMeasuredP_ |
| std::shared_ptr< vrep::VrepRobotArmDriver > | VrepRobotArmDriverSimulatedP_ |
Detailed Description
This object handles taking data from a V-REP based arm simulation using it to configure an arm constrained optimization algorithm, runs the algorithm, then updates the simulation accordingly.
The types of problems this can solve include reaching a goal position, applying the desired levels of force to a system, and avoiding obstacles at each time step.
- See also
- the Tasks libraryhttps://github.com/jrl-umi3218/Tasks for a full set of possible capabilities.
- Todo:
- verify Robotiiwa is the correct base, and RobotMillTipTarget is the right target, because if the transform doesn't match the one in the jacobian the algorithm will break
Definition at line 154 of file InverseKinematicsVrepPlugin.hpp.
Member Typedef Documentation
§ Params
| typedef std::tuple< std::string ,std::string > grl::vrep::InverseKinematicsVrepPlugin::Params |
Definition at line 171 of file InverseKinematicsVrepPlugin.hpp.
Member Enumeration Documentation
§ AlgToUseE
Configures updateKinematics the algorithm the kinematics should use for solving.
| Enumerator | |
|---|---|
| ik | |
| multiIterQP | |
| singleIterQP | |
Definition at line 472 of file InverseKinematicsVrepPlugin.hpp.
§ GoalPosE
|
strong |
Configures updateKinematics with the goal the kinematics should aim for.
| Enumerator | |
|---|---|
| realGoalPosition | |
| debugGoalPosition | |
Definition at line 470 of file InverseKinematicsVrepPlugin.hpp.
§ PostureTaskStrategyE
Configures if the target pose objective should stick to the constant initalized version, or if it should update every iteration in tasks::qp::PostureTask https://github.com/jrl-umi3218/Tasks/blob/15aff94e3e03f6a161a87799ca2cf262b756bd0c/src/QPTasks.h#L426
| Enumerator | |
|---|---|
| constant | |
| updateToCurrent | |
Definition at line 476 of file InverseKinematicsVrepPlugin.hpp.
§ VrepVFControllerParamsIndex
| Enumerator | |
|---|---|
| DesiredKinematicsObjectName | |
| IKGroupName | |
Definition at line 163 of file InverseKinematicsVrepPlugin.hpp.
Constructor & Destructor Documentation
§ InverseKinematicsVrepPlugin()
|
inline |
- Todo:
- need to call parent constructor:
Constructor
Definition at line 181 of file InverseKinematicsVrepPlugin.hpp.
Member Function Documentation
§ construct()
|
inline |
- Todo:
- TODO(ahundt) accept params for both simulated and measured arms
for why this is named as it is see: https://github.com/jrl-umi3218/Tasks/blob/master/tests/arms.h#L34
- Todo:
- TODO(ahundt) replace hardcoded joint strings with a vrep tree traversal object that generates an RBDyn MultiBodyGraph
- Todo:
- TODO(ahundt) fix hard coded Revolute vs fixed joint https://github.com/ahundt/grl/issues/114
- Todo:
- TODO(ahundt) last "joint" RobotMillTip is really fixed...
- Todo:
- TODO(ahundt) extract real inertia and center of mass from V-REP with http://www.coppeliarobotics.com/helpFiles/en/regularApi/simGetShapeMassAndInertia.htm
- Todo:
- TODO(ahundt) consider the origin of the inertia! https://github.com/jrl-umi3218/Tasks/issues/10#issuecomment-257198604
- Todo:
- TODO(ahundt) add real support for links, particularly the respondable aspects, see LBR_iiwa_14_R820_joint1_resp in RoboneSimulation.ttt
- Todo:
- verify object lifetimes
- Todo:
- read objective rows from vrep
- Todo:
- set vrep explicit handling of IK here, plus unset in destructor of this object
Definition at line 186 of file InverseKinematicsVrepPlugin.hpp.
§ debugFrames()
|
inline |
Set dummy frames named Dummy0 to Dummy19 to the current state of the RBDyn and V-REP representations of joints for debugging.
Definition at line 377 of file InverseKinematicsVrepPlugin.hpp.
§ defaultParams()
|
inlinestatic |
Definition at line 173 of file InverseKinematicsVrepPlugin.hpp.
§ run_one()
|
inline |
may not need this it is in the base class blocking call, call in separate thread, just allocates memory
Definition at line 691 of file InverseKinematicsVrepPlugin.hpp.
§ solve()
|
inline |
may not need this it is in the base class this will have output blocking call, call in separate thread, just allocates memory this runs the actual optimization algorithm
Definition at line 702 of file InverseKinematicsVrepPlugin.hpp.
§ testPose()
|
inline |
simulation tick time step in float seconds from vrep API call
- Todo:
- TODO(ahundt) rethink where/when/how to send command for the joint angles. Return to LUA? Set Directly? Distribute via vrep send message command?
Definition at line 438 of file InverseKinematicsVrepPlugin.hpp.
§ updateKinematics()
|
inline |
Runs inverse kinematics or constrained optimization at every simulation time step
- Parameters
-
runOnce Set runOnce = true to only update kinematics once for debugging purposes. runOnce = false runs this function at every time step.
- Todo:
- TODO(ahundt) change source of current state based on if physical arm is running
- Todo:
- TODO(ahundt) move code below here back into separate independent setup and solve functions, move some steps like limits to construct()
simulation tick time step in float seconds from vrep API call
- Todo:
- TODO(ahundt) rethink where/when/how to send command for the joint angles. Return to LUA? Set Directly? Distribute via vrep send message command?
- Todo:
- TODO(ahundt) make solver object a member variable if possible, initialize in constructor
limits must be organized as described in https://github.com/jrl-umi3218/Tasks/issues/10#issuecomment-257793242
- Todo:
- TODO(ahundt) ulimits aren't the same size as jointHandles_, need velocity limits too
- Todo:
- TODO(ahundt) hardcoded mill tip joint limits, remove these
- Todo:
- TODO(ahundt) replace hardcoded velocity limits with real and useful limits specific to each joint loaded from V-REP or another file.
- Todo:
- TODO(ahundt) was this commented correctly?
- Todo:
- TODO(ahundt) remove BOOST_VERIFY(), try/catch solver failure, print an error, send a v-rep message, and shut down solver or enter a hand guiding mode
Definition at line 481 of file InverseKinematicsVrepPlugin.hpp.
Member Data Documentation
§ bodyHandles_
| std::vector<int> grl::vrep::InverseKinematicsVrepPlugin::bodyHandles_ |
Definition at line 717 of file InverseKinematicsVrepPlugin.hpp.
§ currentArmState_
| vrep::VrepRobotArmDriver::State grl::vrep::InverseKinematicsVrepPlugin::currentArmState_ |
Definition at line 753 of file InverseKinematicsVrepPlugin.hpp.
§ ikGroupBaseHandle_
| int grl::vrep::InverseKinematicsVrepPlugin::ikGroupBaseHandle_ |
Definition at line 742 of file InverseKinematicsVrepPlugin.hpp.
§ ikGroupBaseName_
| std::string grl::vrep::InverseKinematicsVrepPlugin::ikGroupBaseName_ |
Definition at line 746 of file InverseKinematicsVrepPlugin.hpp.
§ ikGroupHandle_
| int grl::vrep::InverseKinematicsVrepPlugin::ikGroupHandle_ |
Definition at line 741 of file InverseKinematicsVrepPlugin.hpp.
§ ikGroupTargetHandle_
| int grl::vrep::InverseKinematicsVrepPlugin::ikGroupTargetHandle_ |
Definition at line 744 of file InverseKinematicsVrepPlugin.hpp.
§ ikGroupTargetName_
| std::string grl::vrep::InverseKinematicsVrepPlugin::ikGroupTargetName_ |
Definition at line 748 of file InverseKinematicsVrepPlugin.hpp.
§ ikGroupTipHandle_
| int grl::vrep::InverseKinematicsVrepPlugin::ikGroupTipHandle_ |
Definition at line 743 of file InverseKinematicsVrepPlugin.hpp.
§ ikGroupTipName_
| std::string grl::vrep::InverseKinematicsVrepPlugin::ikGroupTipName_ |
Definition at line 747 of file InverseKinematicsVrepPlugin.hpp.
§ jointHandles_
| std::vector<int> grl::vrep::InverseKinematicsVrepPlugin::jointHandles_ |
- Todo:
- move this item back into VrepRobotArmDriver
Definition at line 734 of file InverseKinematicsVrepPlugin.hpp.
§ jointNames_
| std::vector<std::string> grl::vrep::InverseKinematicsVrepPlugin::jointNames_ |
Definition at line 737 of file InverseKinematicsVrepPlugin.hpp.
§ linkHandles_
| std::vector<int> grl::vrep::InverseKinematicsVrepPlugin::linkHandles_ |
Definition at line 735 of file InverseKinematicsVrepPlugin.hpp.
§ linkNames_
| std::vector<std::string> grl::vrep::InverseKinematicsVrepPlugin::linkNames_ |
Definition at line 738 of file InverseKinematicsVrepPlugin.hpp.
§ linkRespondableHandles_
| std::vector<int> grl::vrep::InverseKinematicsVrepPlugin::linkRespondableHandles_ |
Definition at line 736 of file InverseKinematicsVrepPlugin.hpp.
§ linkRespondableNames_
| std::vector<std::string> grl::vrep::InverseKinematicsVrepPlugin::linkRespondableNames_ |
Definition at line 739 of file InverseKinematicsVrepPlugin.hpp.
§ ranOnce_
| bool grl::vrep::InverseKinematicsVrepPlugin::ranOnce_ = false |
Definition at line 755 of file InverseKinematicsVrepPlugin.hpp.
§ rbd_bodies_
| std::vector<rbd::Body> grl::vrep::InverseKinematicsVrepPlugin::rbd_bodies_ |
Definition at line 713 of file InverseKinematicsVrepPlugin.hpp.
§ rbd_bodyNames_
| std::vector<std::string> grl::vrep::InverseKinematicsVrepPlugin::rbd_bodyNames_ |
Definition at line 716 of file InverseKinematicsVrepPlugin.hpp.
§ rbd_inertias_
| std::vector<sva::RBInertia<double> > grl::vrep::InverseKinematicsVrepPlugin::rbd_inertias_ |
Definition at line 714 of file InverseKinematicsVrepPlugin.hpp.
§ rbd_jointHandles_
| std::vector<int> grl::vrep::InverseKinematicsVrepPlugin::rbd_jointHandles_ |
rbd "joints" include fixed joints that bridge various v-rep objects like the world origin and the ik group base. This is organized a bit differently from the v-rep joint names because we need additional fixed "joints" so we have transforms that match the V-REP scene
Definition at line 729 of file InverseKinematicsVrepPlugin.hpp.
§ rbd_jointNames_
| std::vector<std::string> grl::vrep::InverseKinematicsVrepPlugin::rbd_jointNames_ |
rbd "joints" include fixed joints that bridge various v-rep objects like the world origin and the ik group base. This is organized a bit differently from the v-rep joint names because we need additional fixed "joints" so we have transforms that match the V-REP scene
Definition at line 723 of file InverseKinematicsVrepPlugin.hpp.
§ rbd_joints_
| std::vector<rbd::Joint> grl::vrep::InverseKinematicsVrepPlugin::rbd_joints_ |
Definition at line 715 of file InverseKinematicsVrepPlugin.hpp.
§ rbd_mbcs_
| std::vector<rbd::MultiBodyConfig> grl::vrep::InverseKinematicsVrepPlugin::rbd_mbcs_ |
Definition at line 708 of file InverseKinematicsVrepPlugin.hpp.
§ rbd_mbg_
| rbd::MultiBodyGraph grl::vrep::InverseKinematicsVrepPlugin::rbd_mbg_ |
Definition at line 706 of file InverseKinematicsVrepPlugin.hpp.
§ rbd_mbs_
| std::vector<rbd::MultiBody> grl::vrep::InverseKinematicsVrepPlugin::rbd_mbs_ |
Definition at line 707 of file InverseKinematicsVrepPlugin.hpp.
§ rbd_preferred_mbcs_
| std::vector<rbd::MultiBodyConfig> grl::vrep::InverseKinematicsVrepPlugin::rbd_preferred_mbcs_ |
preferred posture to resolve ambiguities
Definition at line 712 of file InverseKinematicsVrepPlugin.hpp.
§ rbd_prev_mbcs_
| std::vector<rbd::MultiBodyConfig> grl::vrep::InverseKinematicsVrepPlugin::rbd_prev_mbcs_ |
rbd_prev_mbcs_ is for debugging
Definition at line 710 of file InverseKinematicsVrepPlugin.hpp.
§ robotFlangeTipName_
| std::string grl::vrep::InverseKinematicsVrepPlugin::robotFlangeTipName_ |
Definition at line 749 of file InverseKinematicsVrepPlugin.hpp.
§ VrepRobotArmDriverMeasuredP_
| std::shared_ptr<vrep::VrepRobotArmDriver> grl::vrep::InverseKinematicsVrepPlugin::VrepRobotArmDriverMeasuredP_ |
Definition at line 752 of file InverseKinematicsVrepPlugin.hpp.
§ VrepRobotArmDriverSimulatedP_
| std::shared_ptr<vrep::VrepRobotArmDriver> grl::vrep::InverseKinematicsVrepPlugin::VrepRobotArmDriverSimulatedP_ |
Definition at line 751 of file InverseKinematicsVrepPlugin.hpp.
The documentation for this class was generated from the following file: