|
| typedef std::vector< double > | JointScalar |
| |
| typedef std::vector< double > | JointScalar |
| |
| typedef std::vector< double > | JointScalar |
| |
| typedef std::vector< double > | JointScalar |
| |
| typedef std::vector< double > | JointScalar |
| |
| enum | JointStateIndex {
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex
} |
| |
| enum | JointStateIndex {
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex
} |
| |
| enum | JointStateIndex {
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex
} |
| |
| enum | JointStateIndex {
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex
} |
| |
| enum | JointStateIndex {
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex,
JointPosition,
JointForce,
JointTargetPosition,
JointLowerPositionLimit,
JointUpperPositionLimit,
JointMatrix,
JointStateTagIndex
} |
| |
| enum | ParamIndex {
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode
} |
| |
| enum | ParamIndex {
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode
} |
| |
| enum | ParamIndex {
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode
} |
| |
| enum | ParamIndex {
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode
} |
| |
| enum | ParamIndex {
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode,
RobotName,
RobotModel,
LocalZMQAddress,
RemoteZMQAddress,
LocalHostKukaKoniUDPAddress,
LocalHostKukaKoniUDPPort,
RemoteHostKukaKoniUDPAddress,
RemoteHostKukaKoniUDPPort,
KukaCommandMode,
KukaMonitorMode
} |
| |
| typedef std::tuple< std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string > | Params |
| |
| typedef std::tuple< std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string > | Params |
| |
| typedef std::tuple< std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string > | Params |
| |
| typedef std::tuple< std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string > | Params |
| |
| typedef std::tuple< std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string, std::string > | Params |
| |
| typedef std::tuple< JointScalar, JointScalar, JointScalar, JointScalar, JointScalar, TransformationMatrices, robot::arm::KukaJAVAdriver::JointStateTag > | State |
| |
| typedef std::tuple< JointScalar, JointScalar, JointScalar, JointScalar, JointScalar, TransformationMatrices, robot::arm::KukaJAVAdriver::JointStateTag > | State |
| |
| typedef std::tuple< JointScalar, JointScalar, JointScalar, JointScalar, JointScalar, TransformationMatrices, robot::arm::KukaJAVAdriver::JointStateTag > | State |
| |
| typedef std::tuple< JointScalar, JointScalar, JointScalar, JointScalar, JointScalar, TransformationMatrices, robot::arm::KukaJAVAdriver::JointStateTag > | State |
| |
| typedef std::tuple< JointScalar, JointScalar, JointScalar, JointScalar, JointScalar, TransformationMatrices, robot::arm::KukaJAVAdriver::JointStateTag > | State |
| |
| typedef std::vector< TransformationMatrix > | TransformationMatrices |
| |
| typedef std::vector< TransformationMatrix > | TransformationMatrices |
| |
| typedef std::vector< TransformationMatrix > | TransformationMatrices |
| |
| typedef std::vector< TransformationMatrix > | TransformationMatrices |
| |
| typedef std::vector< TransformationMatrix > | TransformationMatrices |
| |
| typedef std::array< double, 12 > | TransformationMatrix |
| |
| typedef std::array< double, 12 > | TransformationMatrix |
| |
| typedef std::array< double, 12 > | TransformationMatrix |
| |
| typedef std::array< double, 12 > | TransformationMatrix |
| |
| typedef std::array< double, 12 > | TransformationMatrix |
| |
|
| void | construct () |
| |
| void | construct () |
| |
| void | construct () |
| |
| void | construct (Params params) |
| |
| void | construct (Params params) |
| |
| void | construct (Params params) |
| |
| void | construct () |
| |
| void | construct (Params params) |
| |
| void | construct () |
| |
| void | construct (Params params) |
| |
| void | dummy_callback (const std_msgs::StringConstPtr &msg) |
| |
| void | dummy_callback (const std_msgs::StringConstPtr &msg) |
| |
| const Params & | getParams () |
| |
| const Params & | getParams () |
| |
| const Params & | getParams () |
| |
| const Params & | getParams () |
| |
| const Params & | getParams () |
| |
| void | jt_callback (const trajectory_msgs::JointTrajectoryConstPtr &msg) |
| |
| void | jt_callback (const trajectory_msgs::JointTrajectoryConstPtr &msg) |
| |
| void | jt_callback (const trajectory_msgs::JointTrajectoryConstPtr &msg) |
| |
| void | jt_callback (const trajectory_msgs::JointTrajectoryConstPtr &msg) |
| |
| void | jt_callback (const trajectory_msgs::JointTrajectoryConstPtr &msg) |
| |
| void | jt_pt_callback (const trajectory_msgs::JointTrajectoryPointConstPtr &msg) |
| |
| void | jt_pt_callback (const trajectory_msgs::JointTrajectoryPointConstPtr &msg) |
| |
| void | jt_pt_callback (const trajectory_msgs::JointTrajectoryPointConstPtr &msg) |
| |
| void | jt_pt_callback (const trajectory_msgs::JointTrajectoryPointConstPtr &msg) |
| |
| void | jt_pt_callback (const trajectory_msgs::JointTrajectoryPointConstPtr &msg) |
| |
| | KukaLBRiiwaROSPlugin (Params params=defaultParams()) |
| |
| | KukaLBRiiwaROSPlugin (Params params=defaultParams()) |
| |
| | KukaLBRiiwaROSPlugin (Params params=defaultParams()) |
| |
| | KukaLBRiiwaROSPlugin (Params params=defaultParams()) |
| |
| | KukaLBRiiwaROSPlugin (Params params=defaultParams()) |
| |
| Params & | loadRosParams (Params ¶ms) |
| |
| Params & | loadRosParams (Params ¶ms) |
| |
| Params & | loadRosParams (Params ¶ms) |
| |
| Params & | loadRosParams (Params ¶ms) |
| |
| Params & | loadRosParams (Params ¶ms) |
| |
| void | mode_callback (const std_msgs::StringConstPtr &msg) |
| | ROS callback to set current interaction mode; determines whether commands will be send in SERVO, TEACH, etc. More...
|
| |
| void | mode_callback (const std_msgs::StringConstPtr &msg) |
| | ROS callback to set current interaction mode; determines whether commands will be send in SERVO, TEACH, etc. More...
|
| |
| void | mode_callback (const std_msgs::StringConstPtr &msg) |
| | ROS callback to set current interaction mode; determines whether commands will be send in SERVO, TEACH, etc. More...
|
| |
| void | mode_callback (const std_msgs::StringConstPtr &msg) |
| | ROS callback to set current interaction mode; determines whether commands will be send in SERVO, TEACH, etc. More...
|
| |
| void | mode_callback (const std_msgs::StringConstPtr &msg) |
| | ROS callback to set current interaction mode; determines whether commands will be send in SERVO, TEACH, etc. More...
|
| |
| bool | run_one () |
| | spin once, call this repeatedly to run the driver More...
|
| |
| bool | run_one () |
| | spin once, call this repeatedly to run the driver More...
|
| |
| bool | run_one () |
| | spin once, call this repeatedly to run the driver More...
|
| |
| bool | run_one () |
| | spin once, call this repeatedly to run the driver More...
|
| |
| bool | run_one () |
| | spin once, call this repeatedly to run the driver More...
|
| |
| void | set_cartesian_impedance_callback (const cartesian_impedance_msgs::SetCartesianImpedanceConstPtr &cartImpedance) |
| |
| void | set_cartesian_impedance_callback (const cartesian_impedance_msgs::SetCartesianImpedanceConstPtr &cartImpedance) |
| |
| void | set_force_control_callback (const cartesian_impedance_msgs::SetCartesianForceCtrlConstPtr &cartFTCtrl) |
| |
| void | set_force_control_callback (const cartesian_impedance_msgs::SetCartesianForceCtrlConstPtr &cartFTCtrl) |
| |
| bool | setState (State &state) |
| |
| bool | setState (State &state) |
| |
| bool | setState (State &state) |
| |
| bool | setState (State &state) |
| |
| bool | setState (State &state) |
| |
| | ~KukaLBRiiwaROSPlugin () |
| |
| | ~KukaLBRiiwaROSPlugin () |
| |
| | ~KukaLBRiiwaROSPlugin () |
| |
| | ~KukaLBRiiwaROSPlugin () |
| |
| | ~KukaLBRiiwaROSPlugin () |
| |
|
| boost::asio::io_service | device_driver_io_service |
| |
| std::unique_ptr< boost::asio::io_service::work > | device_driver_workP_ |
| |
| std::unique_ptr< std::thread > | driver_threadP |
| |
| std::string | dummy_message |
| |
| std::vector< double > | realJointForce = { 0, 0, 0, 0, 0, 0, 0 } |
| |
| std::vector< double > | realJointPosition = { 0, 0, 0, 0, 0, 0, 0 } |
| |
| std::vector< double > | simJointForce |
| |
| std::vector< double > | simJointPosition |
| |
| std::vector< double > | simJointTargetPosition = {0.0,0.0,0.0,0.0,0.0,0.0,0.0} |
| |
| KukaLBRiiwaROSPlugin::TransformationMatrices | simJointTransformationMatrix |
| |
| std::vector< double > | simJointVelocity = {0.0,0.0,0.0,0.0,0.0,0.0,0.0} |
| |
This class contains code to offer a simple communication layer between ROS and the KUKA LBR iiwa
- Todo:
- Main Loop Update Rate must be supplied to underlying Driver for FRI mode. see KukaLBRiiwaVrepPlugin for reference, particularly kukaDriverP_->set(simulationTimeStep_,time_duration_command_tag());
This class contains code to offer a simple communication layer between ROS and the KUKA LBR iiwa
- Todo:
- Main Loop Update Rate must be supplied to underlying Driver for FRI mode. see KukaLBRiiwaVrepPlugin for reference, particularly kukaDriverP_->set(simulationTimeStep_,time_duration_command_tag());
This class contains code to offer a simple communication layer between ROS and the KUKA LBR iiwa
- Todo:
- Main Loop Update Rate must be supplied to underlying Driver for FRI mode. see KukaLBRiiwaVrepPlugin for reference, particularly kukaDriverP_->set(simulationTimeStep_,time_duration_command_tag());
This class contains code to offer a simple communication layer between ROS and the KUKA LBR iiwa
- Todo:
- Main Loop Update Rate must be supplied to underlying Driver for FRI mode. see KukaLBRiiwaVrepPlugin for reference, particularly kukaDriverP_->set(simulationTimeStep_,time_duration_command_tag());
This class contains code to offer a simple communication layer between ROS and the KUKA LBR iiwa
- Todo:
- Main Loop Update Rate must be supplied to underlying Driver for FRI mode. see KukaLBRiiwaVrepPlugin for reference, particularly kukaDriverP_->set(simulationTimeStep_,time_duration_command_tag());
Definition at line 52 of file KukaLBRiiwaROSPlugin.hpp.
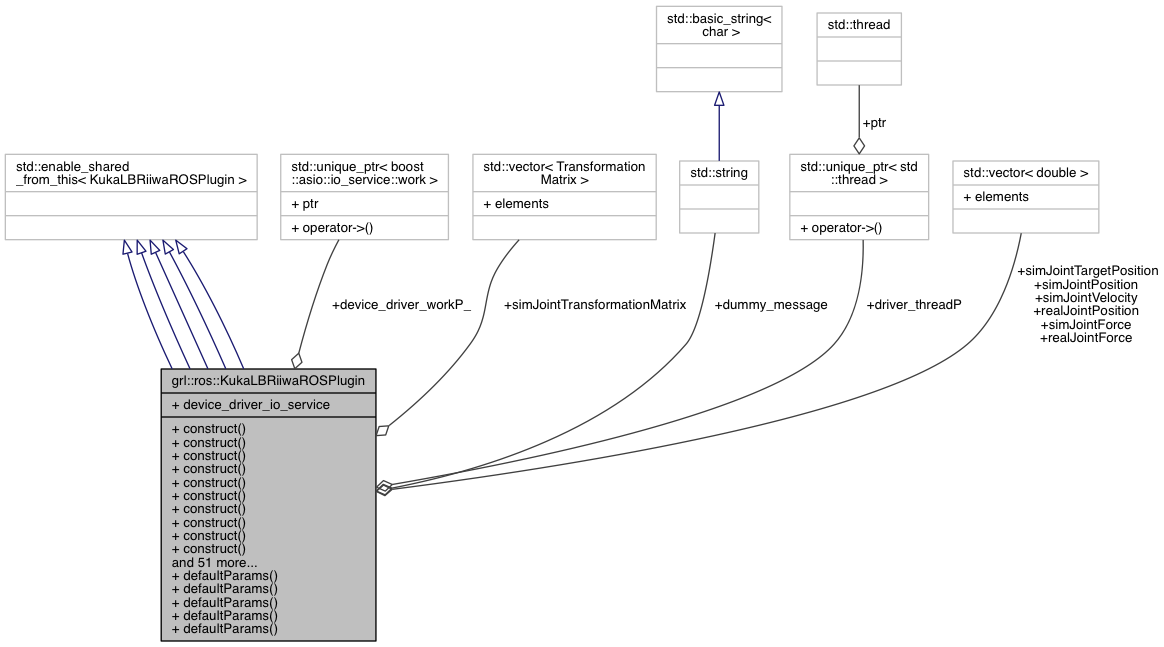
 Inheritance diagram for grl::ros::KukaLBRiiwaROSPlugin:
Inheritance diagram for grl::ros::KukaLBRiiwaROSPlugin: