 Inheritance diagram for grl.TeachMode:
Inheritance diagram for grl.TeachMode: Collaboration diagram for grl.TeachMode:
Collaboration diagram for grl.TeachMode: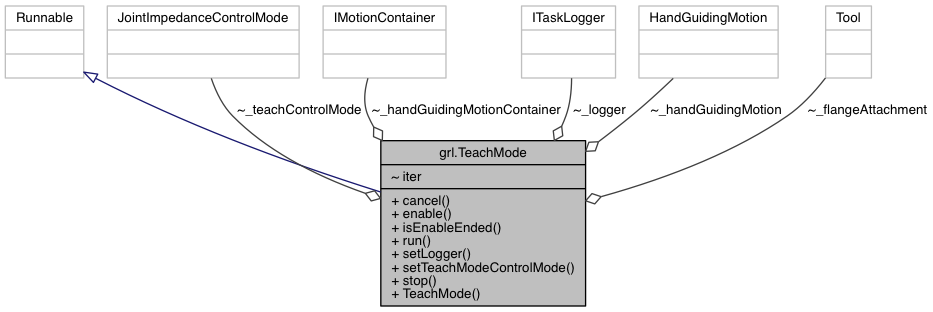
Public Member Functions | |
| boolean | cancel () |
| void | enable () |
| synchronized boolean | isEnableEnded () |
| true there are no outstanding calls made to enable() and you can switch modes More... | |
| void | run () |
| void | setLogger (ITaskLogger logger) |
| void | setTeachModeControlMode (JointImpedanceControlMode teachModeControlMode) |
| synchronized boolean | stop () |
| TeachMode (Tool flangeAttachment, double[] maxAllowedJoints, double[] minAllowedJoints) | |
Detailed Description
In TeachModeTest you will need to set boolean useTeachModeObject = false;
This object is supposed to make it easy to enable/disable teach mode with a single call to start() and stop() when you want to enable and disable teach mode.
- Todo:
- the method used to simulate teach mode is a little jumpy, needs to be improved.
Definition at line 30 of file TeachMode.java.
Constructor & Destructor Documentation
§ TeachMode()
|
inline |
- Parameters
-
flangeAttachment maxAllowedJoints minAllowedJoints
Definition at line 52 of file TeachMode.java.
Member Function Documentation
§ cancel()
|
inline |
Cancel the motion, thread stays in existence.
Definition at line 95 of file TeachMode.java.
§ enable()
|
inline |
Definition at line 72 of file TeachMode.java.
§ isEnableEnded()
|
inline |
true there are no outstanding calls made to enable() and you can switch modes
- See also
- enable()
The sunrise HandGuidingMotion mode has an API quirk where you need to push the physical button to end the hand guiding mode. This tells you if the motion is both over and the button has been pushed so the action is really truly complete.
- Returns
- true if you can switch modes now, false if someone still needs to press the physical button
Definition at line 124 of file TeachMode.java.
§ run()
|
inline |
Definition at line 139 of file TeachMode.java.
§ setLogger()
|
inline |
Definition at line 60 of file TeachMode.java.
§ setTeachModeControlMode()
|
inline |
- Parameters
-
teachModeControlMode
Definition at line 68 of file TeachMode.java.
§ stop()
|
inline |
Tell the hand guiding motion (teach mode) to stop and the thread exits. Make sure isEnableEnded returns true before calling this!
- Returns
- false on failure; true on successfully starting the shutdown process
Definition at line 85 of file TeachMode.java.
The documentation for this class was generated from the following file: