#include <string>#include <tuple>#include <boost/format.hpp>#include <Eigen/Core>#include <Eigen/Geometry>#include <sawConstraintController/mtsVFController.h>#include "grl/cisst/GrlVFController.hpp"#include "grl/vrep/Vrep.hpp"#include "grl/vrep/VrepRobotArmDriver.hpp"#include "grl/vrep/VrepRobotArmJacobian.hpp"#include "grl/vrep/Eigen.hpp"#include <boost/lexical_cast.hpp>#include <boost/range/algorithm/copy.hpp> Include dependency graph for VrepVFController.hpp:
Include dependency graph for VrepVFController.hpp: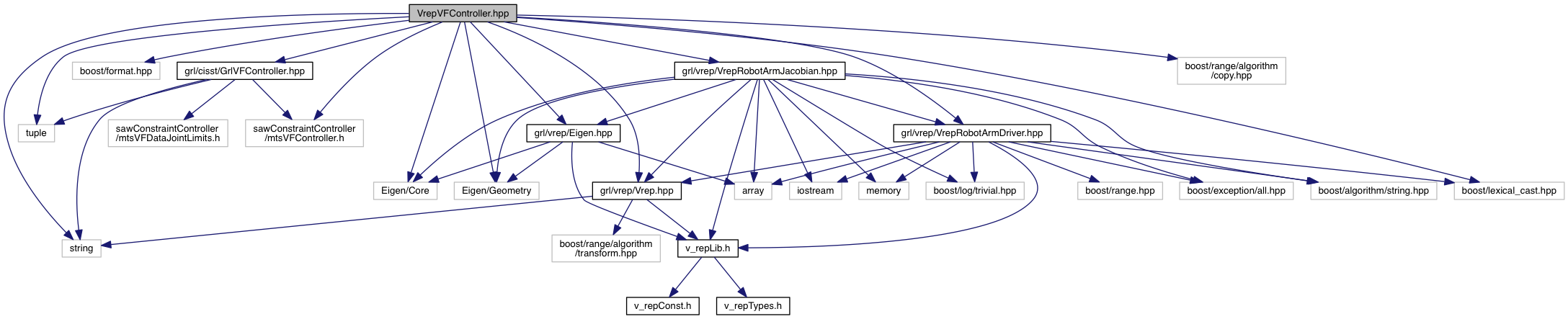 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: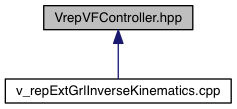
Go to the source code of this file.
Classes | |
| class | grl::VrepInverseKinematicsController |
Namespaces | |
| grl | |