#include <boost/asio.hpp>
#include <boost/circular_buffer.hpp>
#include <boost/config.hpp>
#include <boost/exception/all.hpp>
#include <chrono>
#include <memory>
#include <thread>
#include <tuple>
#include <boost/math/special_functions/sign.hpp>
#include <boost/range/algorithm/copy.hpp>
#include <boost/range/algorithm/transform.hpp>
#include "friClientData.h"
#include "friClientIf.h"
#include "grl/exception.hpp"
#include "grl/kuka/KukaFRIalgorithm.hpp"
#include "Kuka.hpp"
#include "KukaFRI.hpp"
Go to the source code of this file.
|
| void | grl::robot::arm::copy (const FRIMonitoringMessage &monitoringMsg, KukaState &state) |
| | don't use this More...
|
| |
| void | grl::robot::arm::decode (KUKA::FRI::ClientData &friData, std::size_t msg_size) |
| | internal function to decode KUKA FRI message buffer (using nanopb decoder) for the KUKA FRI More...
|
| |
| template<typename LowLevelStepAlgorithmType = LinearInterpolation> |
| std::size_t | grl::robot::arm::encode (LowLevelStepAlgorithmType &step_alg, KUKA::FRI::ClientData &friData, boost::system::error_code &ec) |
| | encode data in the class KUKA::FRI::ClientData into the send buffer for the KUKA FRI. this preps the information for transport over the network More...
|
| |
| template<typename T , size_t N> |
| std::ostream & | operator<< (std::ostream &out, const boost::container::static_vector< T, N > &v) |
| |
| template<typename LowLevelStepAlgorithmType = LinearInterpolation> |
| void | grl::robot::arm::update_state (boost::asio::ip::udp::socket &socket, LowLevelStepAlgorithmType &step_alg, KUKA::FRI::ClientData &friData, boost::system::error_code &receive_ec, std::size_t &receive_bytes_transferred, boost::system::error_code &send_ec, std::size_t &send_bytes_transferred, boost::asio::ip::udp::endpoint sender_endpoint=boost::asio::ip::udp::endpoint()) |
| | Actually talk over the network to receive an update and send out a new KUKA FRI command. More...
|
| |
§ operator<<()
template<typename T , size_t N>
| std::ostream& operator<< |
( |
std::ostream & |
out, |
|
|
const boost::container::static_vector< T, N > & |
v |
|
) |
| |
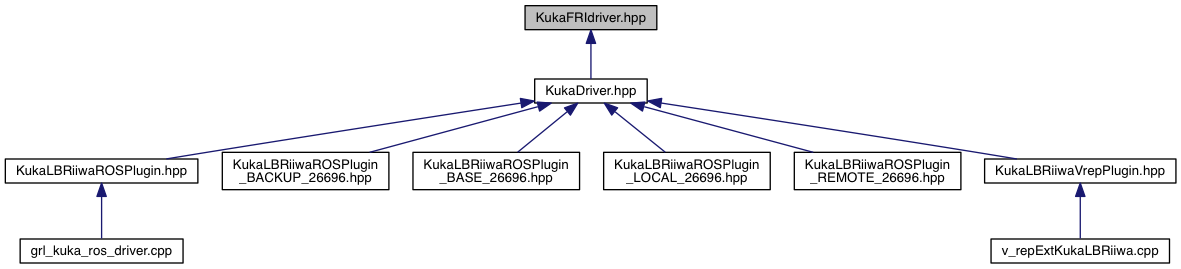
 Include dependency graph for KukaFRIdriver.hpp:
Include dependency graph for KukaFRIdriver.hpp: