|
| template<typename OutputIterator > |
| void | grl::robot::arm::copy (const FRIMonitoringMessage &monitoringMsg, OutputIterator it, revolute_joint_angle_open_chain_state_tag) |
| | copy measured joint angle to output iterator More...
|
| |
| template<typename OutputIterator > |
| void | grl::robot::arm::copy (const FRIMonitoringMessage &monitoringMsg, OutputIterator it, revolute_joint_angle_interpolated_open_chain_state_tag) |
| | copy interpolated commanded joint angles More...
|
| |
| template<typename OutputIterator > |
| void | grl::robot::arm::copy (const FRIMonitoringMessage &monitoringMsg, OutputIterator it, revolute_joint_angle_open_chain_command_tag) |
| | copy commanded joint angle to output iterator More...
|
| |
| template<typename OutputIterator > |
| void | grl::robot::arm::copy (const FRIMonitoringMessage &monitoringMsg, OutputIterator it, revolute_joint_torque_open_chain_state_tag) |
| | copy measured joint torque to output iterator More...
|
| |
| template<typename OutputIterator > |
| void | grl::robot::arm::copy (const FRIMonitoringMessage &monitoringMsg, OutputIterator it, revolute_joint_torque_external_open_chain_state_tag) |
| | copy measured external joint torque to output iterator More...
|
| |
| template<typename OutputIterator > |
| void | grl::robot::arm::copy (const FRIMonitoringMessage &monitoringMsg, OutputIterator it, cartesian_external_force_tag) |
| |
| template<typename OutputIterator > |
| void | grl::robot::arm::copy (const FRIMonitoringMessage &monitoringMsg, OutputIterator it, revolute_joint_torque_open_chain_command_tag) |
| | copy commanded joint torque to output iterator More...
|
| |
| template<typename T , typename OutputIterator > |
| void | grl::robot::arm::kuka::detail::copyCartesianState (T values, OutputIterator it, bool dataAvailable=true) |
| |
| template<typename T , typename OutputIterator > |
| void | grl::robot::arm::kuka::detail::copyJointState (T values, OutputIterator it, bool dataAvailable=true) |
| |
| template<typename T > |
| boost::iterator_range< T > | grl::robot::arm::kuka::detail::get (T &values, bool dataAvailable=true) |
| |
| KUKA::FRI::ESafetyState | grl::robot::arm::get (const FRIMonitoringMessage &monitoringMsg, const KUKA::FRI::ESafetyState) |
| |
| KUKA::FRI::EOperationMode | grl::robot::arm::get (const FRIMonitoringMessage &monitoringMsg, const KUKA::FRI::EOperationMode) |
| |
| KUKA::FRI::EControlMode | grl::robot::arm::get (const FRIMonitoringMessage &monitoringMsg, const KUKA::FRI::EControlMode) |
| |
| KUKA::FRI::EClientCommandMode | grl::robot::arm::get (const FRIMonitoringMessage &monitoringMsg, const KUKA::FRI::EClientCommandMode) |
| |
| KUKA::FRI::EOverlayType | grl::robot::arm::get (const FRIMonitoringMessage &monitoringMsg, const KUKA::FRI::EOverlayType) |
| |
| KUKA::FRI::EDriveState | grl::robot::arm::get (const FRIMonitoringMessage &_message, const KUKA::FRI::EDriveState) |
| |
| KUKA::FRI::ESessionState | grl::robot::arm::get (const FRIMonitoringMessage &monitoringMsg, const KUKA::FRI::ESessionState) |
| |
| KUKA::FRI::EConnectionQuality | grl::robot::arm::get (const FRIMonitoringMessage &monitoringMsg, const KUKA::FRI::EConnectionQuality) |
| |
| uint32_t | grl::robot::arm::get (const FRIMonitoringMessage &monitoringMsg, const grl::time_step_tag) |
| | Get FRI UDP packet time step (1-5ms) in milliseconds between each device sync. More...
|
| |
| std::size_t | grl::robot::arm::get (const FRIMonitoringMessage &monitoringMsg, const kuka::receive_multiplier) |
| |
| std::chrono::time_point< std::chrono::high_resolution_clock > | grl::robot::arm::get (const FRIMonitoringMessage &monitoringMsg, const std::chrono::time_point< std::chrono::high_resolution_clock >) |
| |
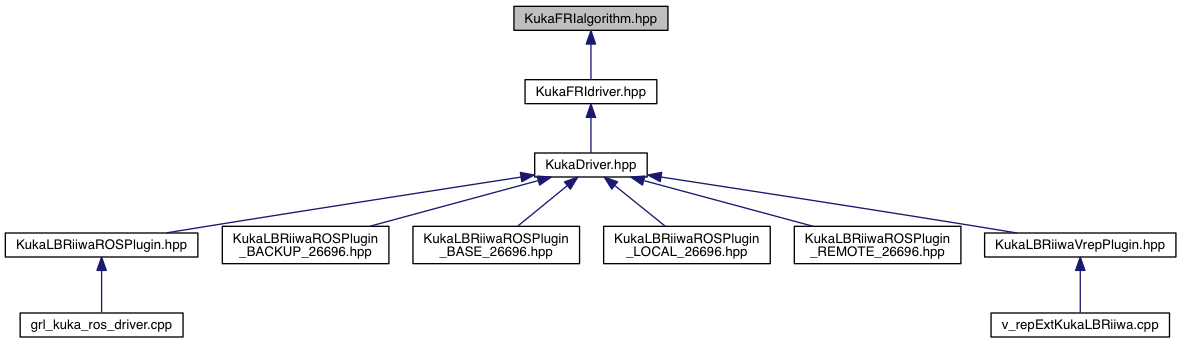
 Include dependency graph for KukaFRIalgorithm.hpp:
Include dependency graph for KukaFRIalgorithm.hpp: