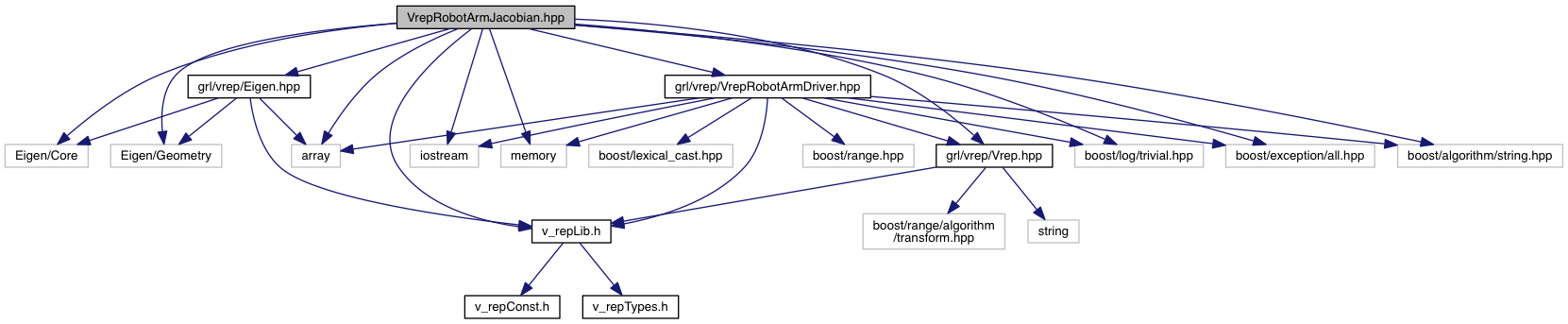
#include <iostream>
#include <memory>
#include <array>
#include <boost/log/trivial.hpp>
#include <boost/exception/all.hpp>
#include <boost/algorithm/string.hpp>
#include <Eigen/Core>
#include <Eigen/Geometry>
#include "grl/vrep/Vrep.hpp"
#include "grl/vrep/VrepRobotArmDriver.hpp"
#include "grl/vrep/Eigen.hpp"
#include "v_repLib.h"
Go to the source code of this file.
|
| Eigen::MatrixXf | grl::vrep::getJacobian (vrep::VrepRobotArmDriver &driver, bool jacobianOnly=false) |
| | get the Jacobian as calculated by vrep in an Eigen::MatrixXf in column major format More...
|
| |
 Include dependency graph for VrepRobotArmJacobian.hpp:
Include dependency graph for VrepRobotArmJacobian.hpp: