 Include dependency graph for SpaceVecAlg.hpp:
Include dependency graph for SpaceVecAlg.hpp: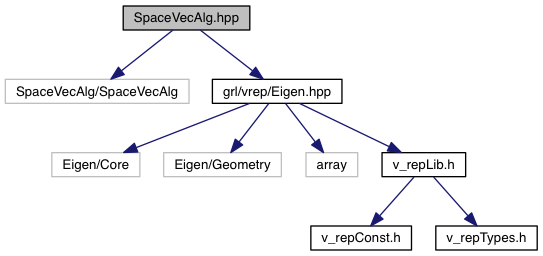 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file: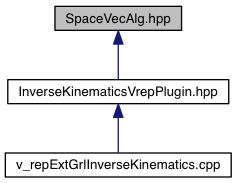
Go to the source code of this file.
Functions | |
| sva::PTransform< double > | eigenAffineToPtransform (const Eigen::Affine3d &eigenTransform) |
| sva::PTransform< double > | getJointPTransform (int objectHandle) |
| sva::PTransform< double > | getObjectPTransform (int objectHandle, int relativeToObjectHandle=-1) |
| Eigen::Affine3d | PTranformToEigenAffine (sva::PTransform< double > &ptransform) |
Function Documentation
§ eigenAffineToPtransform()
| sva::PTransform<double> eigenAffineToPtransform | ( | const Eigen::Affine3d & | eigenTransform | ) |
Definition at line 22 of file SpaceVecAlg.hpp.
§ getJointPTransform()
| sva::PTransform<double> getJointPTransform | ( | int | objectHandle | ) |
Definition at line 35 of file SpaceVecAlg.hpp.
§ getObjectPTransform()
| sva::PTransform<double> getObjectPTransform | ( | int | objectHandle, |
| int | relativeToObjectHandle = -1 |
||
| ) |
Get the plucker transform from the object to the base.
- Parameters
-
objectHandle The V-Rep object handle for which the transform is needed relativeToObjectHandle The frame of reference in which to get the object handle, -1 (the default) gets the absolute position aka world frame for constructor see: https://github.com/jrl-umi3218/SpaceVecAlg/blob/master/src/PTransform.h
Definition at line 15 of file SpaceVecAlg.hpp.
§ PTranformToEigenAffine()
| Eigen::Affine3d PTranformToEigenAffine | ( | sva::PTransform< double > & | ptransform | ) |
Definition at line 27 of file SpaceVecAlg.hpp.